publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2026
- RO-MANModerate Human Assistance Enhances Task Performance and Social Perception in Human-Swarm CollaborationRuyi Tian, Genki Miyauchi, Roderich Groß, and Chaona ChenIn IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (in press), 2026
Human-swarm collaboration requires balancing effective task execution with positive social perception of human-robot teams. In this study, we investigate how human operators, acting as teammates, influence both objective team performance and social perception in human-swarm collaboration. We conducted a user study with 40 participants in a simulated search-and-assembly task with ten robots, where each participant controlled a single robot within predefined swarm configurations, with team behavior shaped by human assistance. We analyzed how varying levels of human assistance relate to task completion time and perceived warmth and competence of the swarm, alongside subjective ratings of joint effort. Results show that human involvement does not uniformly improve performance. Instead, moderate levels of human assistance were associated with the greatest reduction in completion time, outperforming both low and high assistance conditions. Moderate assistance also produced more positive shifts in perceived warmth and competence. Together, these findings highlight that effective human-swarm teaming depends on balancing the level of human assistance so that it supports strong task performance and positive social perception.
@inproceedings{tian2026moderate, title = {Moderate Human Assistance Enhances Task Performance and Social Perception in Human-Swarm Collaboration}, author = {Tian, Ruyi and Miyauchi, Genki and Gro{\ss}, Roderich and Chen, Chaona}, booktitle = {IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (in press)}, pages = {}, year = {2026}, organization = {IEEE}, } - WAFR
 Scalable Multi-Agent Maze Traversal With Local CommunicationJulian Rau, Jahir Argote-Gerald, Grace McFassel, Genki Miyauchi, Paul Trodden, and Roderich GroßIn 17th World Symposium on the Algorithmic Foundations of Robotics (WAFR) (in press), 2026
Scalable Multi-Agent Maze Traversal With Local CommunicationJulian Rau, Jahir Argote-Gerald, Grace McFassel, Genki Miyauchi, Paul Trodden, and Roderich GroßIn 17th World Symposium on the Algorithmic Foundations of Robotics (WAFR) (in press), 2026Cave networks, pipe systems, and similar maze-like environments pose significant challenges for multi-agent navigation in unknown settings with limited communication. We propose a distributed algorithm that enables agents to collectively traverse an unknown, possibly cyclic graph. Agents enter sequentially at a designated start node and are tasked to localize and reach an undisclosed goal while avoiding collisions. They coordinate via local communication using leader-follower relationships and leader switching. At any moment in time, exploration is performed by only one of the agents, which runs a single-agent maze solver. We prove that the algorithm is complete, that its makespan is asymptotically equivalent (in the number of agents) to that of an optimal full-knowledge strategy, and derive its time and space complexity. Simulations with up to 625 agents show a decreasing average sum-of-fuels as the number of agents increases and demonstrate that the proposed approach outperforms a naïve baseline in which all agents independently execute the single-agent solver.
@inproceedings{rau2026scalable, title = {Scalable Multi-Agent Maze Traversal With Local Communication}, author = {Rau, Julian and Argote-Gerald, Jahir and McFassel, Grace and Miyauchi, Genki and Trodden, Paul and Gro{\ss}, Roderich}, booktitle = {17th World Symposium on the Algorithmic Foundations of Robotics (WAFR) (in press)}, pages = {}, year = {2026}, organization = {Springer}, } - ANTS
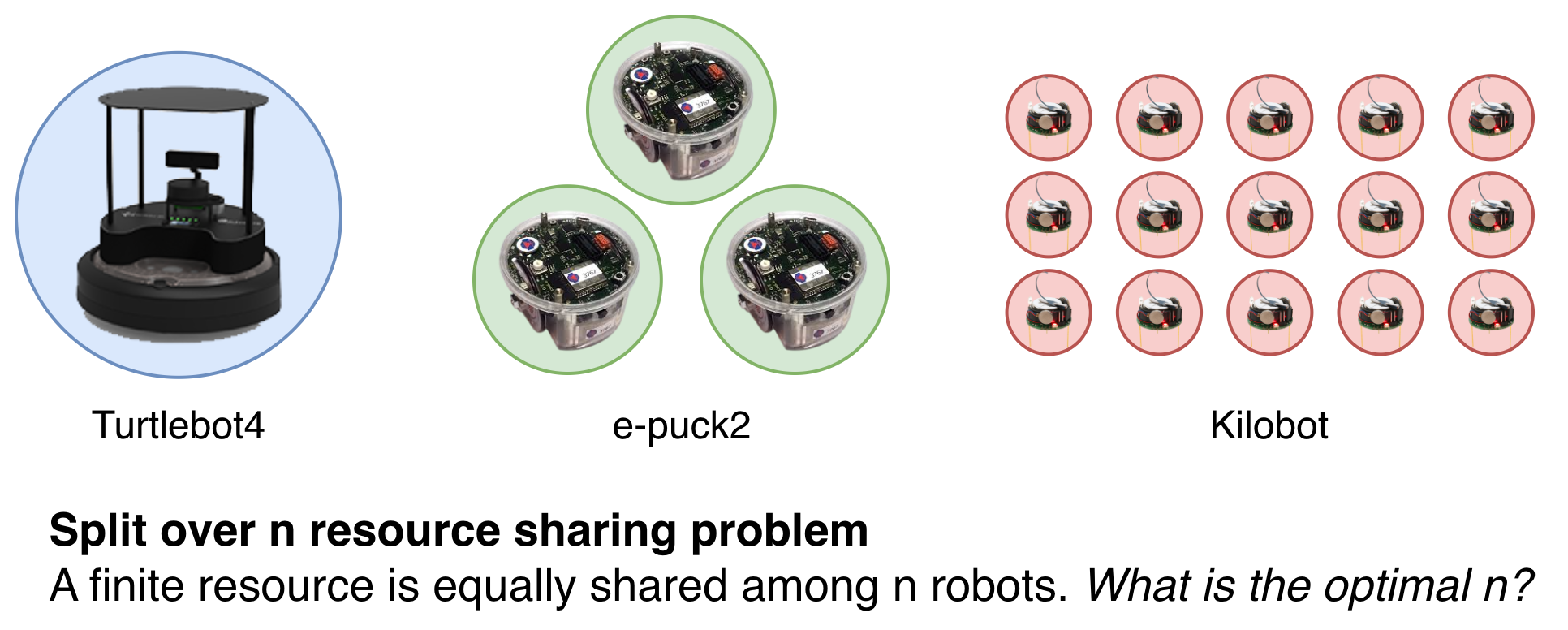 Split Over n Resource Sharing Problem: Are Fewer Capable Agents Better Than Many Simpler Ones?Karthik Soma, Mohamed S. Talamali, Genki Miyauchi, Giovanni Beltrame, Heiko Hamann, and Roderich GroßIn 15th International Conference on Swarm Intelligence (ANTS), 2026
Split Over n Resource Sharing Problem: Are Fewer Capable Agents Better Than Many Simpler Ones?Karthik Soma, Mohamed S. Talamali, Genki Miyauchi, Giovanni Beltrame, Heiko Hamann, and Roderich GroßIn 15th International Conference on Swarm Intelligence (ANTS), 2026In multi-agent systems, should limited resources be concentrated into a few capable agents or distributed among many simpler ones? This work formulates the split over n resource sharing problem where a group of n agents equally shares a common resource (e.g., monetary budget, computational resources, physical size). We present a case study in multi-agent coverage where the area of the disk-shaped footprint of agents scales as 1/n. A formal analysis reveals that the initial coverage rate grows with n$. However, if the speed of agents decreases proportionally with their radii, groups of all sizes perform equally well, whereas if it decreases proportionally with their footprints, a single agent performs best. We also present computer simulations in which resource splitting increases the failure rates of individual agents. The models and findings help identify optimal distributiveness levels and inform the design of multi-agent systems under resource constraints.
@inproceedings{soma2026split, title = {Split Over $n$ Resource Sharing Problem: Are Fewer Capable Agents Better Than Many Simpler Ones?}, author = {Soma, Karthik and Talamali, Mohamed S. and Miyauchi, Genki and Beltrame, Giovanni and Hamann, Heiko and Gro{\ss}, Roderich}, booktitle = {15th International Conference on Swarm Intelligence (ANTS)}, pages = {438--446}, year = {2026}, organization = {Springer}, doi = {https://doi.org/10.1007/978-3-032-26123-6_39}, } - ANTS
 Warmth and Competence in the Swarm: Designing Effective Human-Robot TeamsGenki Miyauchi, Roderich Groß, and Chaona ChenIn 15th International Conference on Swarm Intelligence (ANTS), 2026
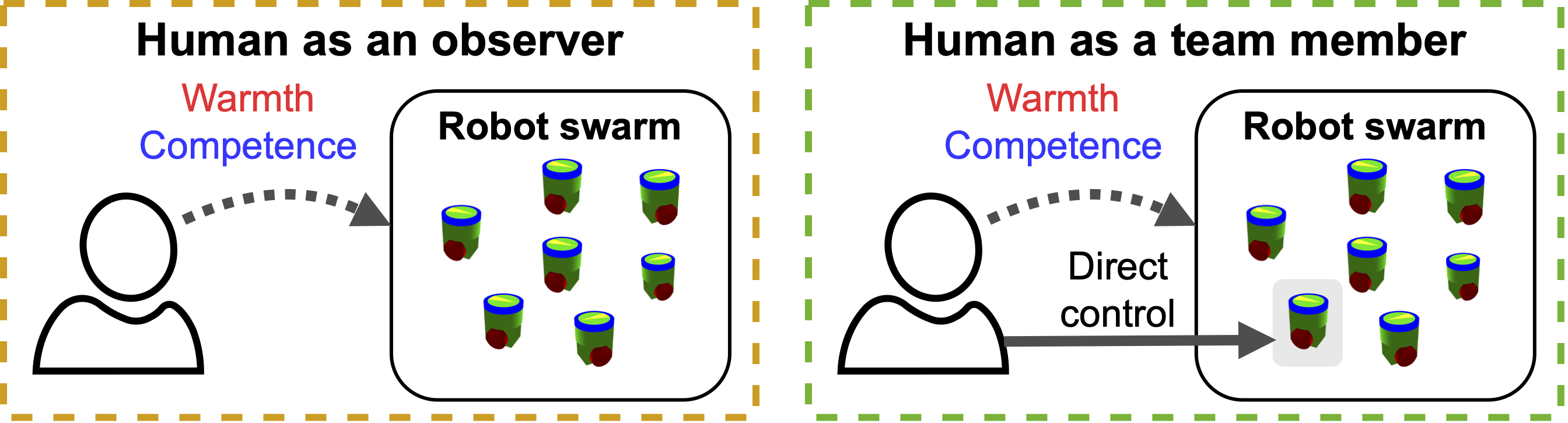
Warmth and Competence in the Swarm: Designing Effective Human-Robot TeamsGenki Miyauchi, Roderich Groß, and Chaona ChenIn 15th International Conference on Swarm Intelligence (ANTS), 2026As groups of robots increasingly collaborate with humans, understanding how humans perceive them is critical for designing effective human-robot teams. While prior research examined how humans interpret and evaluate the abilities and intentions of individual agents, social perception of robot teams remains relatively underexplored. Drawing on the competence–warmth framework, we conducted two studies manipulating swarm behaviors in completing a collective search task and measured the social perception of swarm behaviors when human participants are either observers (Study 1) and operators (Study 2). Across both studies, our results show that variations in swarm behaviors consistently influenced participants’ perceptions of warmth and competence. Notably, longer broadcast durations increased perceived warmth; larger separation distances increased perceived competence. Interestingly, individual robot speed had no effect on either of the perceptions. Furthermore, our results show that these social perceptions predicted participants’ team preferences more strongly than task performance. Participants preferred robot teams that were both warm and competent, not those that completed tasks most quickly. These findings demonstrate that human-robot interaction dynamically shapes social perception, underscoring the importance of integrating both technical and social considerations when designing robot swarms for effective human-robot collaboration.
@inproceedings{miyauchi2026warmth, title = {Warmth and Competence in the Swarm: Designing Effective Human-Robot Teams}, author = {Miyauchi, Genki and Gro{\ss}, Roderich and Chen, Chaona}, booktitle = {15th International Conference on Swarm Intelligence (ANTS)}, pages = {272--286}, year = {2026}, organization = {Springer}, doi = {https://doi.org/10.1007/978-3-032-26123-6_21}, }
2025
- MRS
 Design for One, Deploy for Many: Navigating Tree Mazes with Multiple AgentsJahir Argote-Gerald, Genki Miyauchi, Julian Rau, Paul Trodden, and Roderich GroßIn IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) (in press), 2025Best Paper Award Finalist
Design for One, Deploy for Many: Navigating Tree Mazes with Multiple AgentsJahir Argote-Gerald, Genki Miyauchi, Julian Rau, Paul Trodden, and Roderich GroßIn IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) (in press), 2025Best Paper Award FinalistBest Paper Award Finalist
Maze-like environments, such as cave and pipe networks, pose unique challenges for multiple robots to coordinate, including communication constraints and congestion. To address these challenges, we propose a distributed multi-agent maze traversal algorithm for environments that can be represented by acyclic graphs. It uses a leader-switching mechanism where one agent, assuming a head role, employs any single-agent maze solver while the other agents each choose an agent to follow. The head role gets transferred to neighboring agents where necessary, ensuring it follows the same path as a single agent would. The multi-agent maze traversal algorithm is evaluated in simulations with groups of up to 300 agents, various maze sizes, and multiple single-agent maze solvers. It is compared against strategies that are naïve, or assume either global communication or full knowledge of the environment. The algorithm outperforms the naïve strategy in terms of makespan and sum-of-fuel. It is superior to the global-communication strategy in terms of makespan but is inferior to it in terms of sum-of-fuel. The findings suggest it is asymptotically equivalent to the full-knowledge strategy with respect to either metric. Moreover, real-world experiments with up to 20 Pi-puck robots confirm the feasibility of the approach.
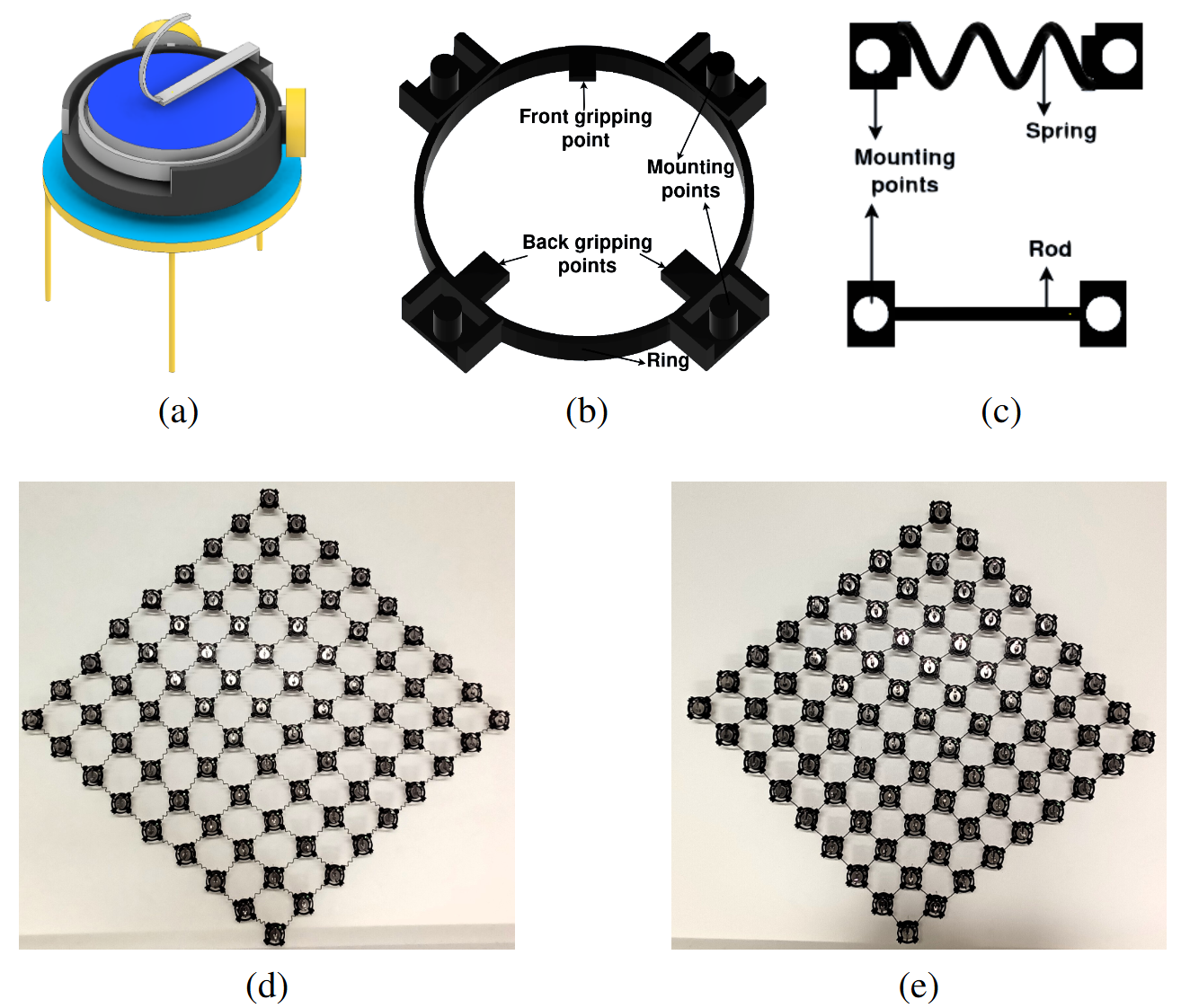
@inproceedings{argote-gerald2025design, title = {Design for One, Deploy for Many: Navigating Tree Mazes with Multiple Agents}, author = {Argote-Gerald, Jahir and Miyauchi, Genki and Rau, Julian and Trodden, Paul and Gro{\ss}, Roderich}, booktitle = {IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) (in press)}, pages = {}, year = {2025}, organization = {IEEE}, } - Scalable Plug-and-Play Robotic Fabrics Based on Kilobot ModulesStanley C. Obilikpa, Mohamed S. Talamali, Genki Miyauchi, John Oyekan, and Roderich GroßIEEE Robotics and Automation Letters (RA-L), 2025
This paper presents a framework for producing robotic fabrics using square lattice formations of interlinked Kilobot modules. The framework supports: (i) fabrics of arbitrary size and shape; (ii) different types of deformable links, namely springs and rods; (iii) easy plug-and-play reconfigurability. Two decentralized straight motion controllers are tested with robotic fabrics comprising up to 81 physical modules: an open-loop controller and a controller from the literature that responds to deformations within the fabric. For spring-based robotic fabrics, the deformation-correcting controller performs best overall, whereas for rod-based robotic fabrics, it is outperformed by the open-loop controller. A decentralized turning motion controller is formally derived and examined for either type of fabric, revealing the ability of the robotic fabrics to move along a curved trajectory using open-loop control. Finally, robotic fabrics are shown to perform basic object manipulation tasks. Robotic fabrics that deploy themselves based on distributed, embodied intelligence could pave the way for novel applications, from patching broken pipes to medical uses within the human body.
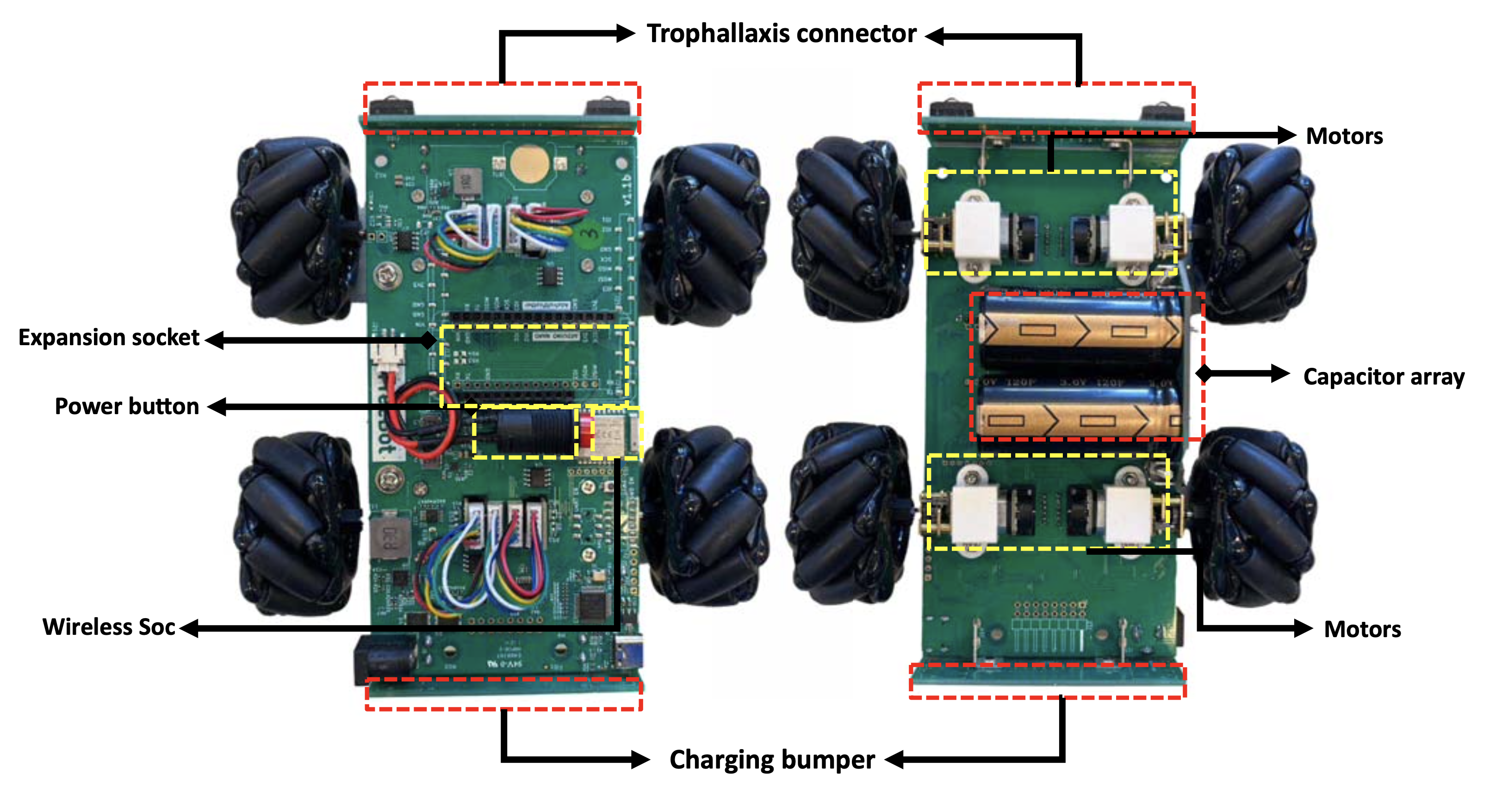
@article{obilikpa2025scalable, title = {Scalable Plug-and-Play Robotic Fabrics Based on Kilobot Modules}, author = {Obilikpa, Stanley C. and Talamali, Mohamed S. and Miyauchi, Genki and Oyekan, John and Gro{\ss}, Roderich}, journal = {IEEE Robotics and Automation Letters (RA-L)}, volume = {10}, number = {7}, pages = {6832--6839}, year = {2025}, publisher = {IEEE}, doi = {https://doi.org/10.1109/LRA.2025.3568313}, } - CapBot: Enabling Battery-Free Swarm RoboticsMengyao Liu, Lowie Deferme, Tom Van Eyck, Sam Michiels, Alexandre Abadie, Said Alvarado-Marin, Filip Maksimovic, Genki Miyauchi, Jessica Jayakumar, Mohamed S. Talamali, Thomas Watteyne, Roderich Groß, and Danny HughesIn 2025 International Conference on Robotics and Automation (ICRA), 2025
Swarm robotics focuses on designing and coordinating large groups of relatively simple robots to perform tasks in a decentralised and collective manner. The swarm provides a resilient and flexible solution for many applications. However, contemporary swarm robots have a significant power problem in that secondary (i.e. rechargeable) batteries are slow to charge and offer lifetimes of only a few years, increasing maintenance costs and pollution due to battery replacement. We imagine a different future, wherein battery-free robots powered by supercapacitors can be recharged in seconds, offer long-life autonomous operation and can rapidly pass charge between one another using trophallaxis. In pursuit of this vision, we contribute the CapBot, a battery-free swarm robot equipped with Mecanum wheels, a Cortex M4F application processor and Bluetooth Low Energy networking. The CapBot fully recharges in 16 s, offers 51 min of autonomous operation at top speed, and can transfer up to 50% of its available charge to a peer via trophallaxis in under 20 s. The CapBot is fully open source and all software and hardware source is available online.
@inproceedings{liu2025capbot, title = {CapBot: Enabling Battery-Free Swarm Robotics}, author = {Liu, Mengyao and Deferme, Lowie and Van Eyck, Tom and Michiels, Sam and Abadie, Alexandre and Alvarado-Marin, Said and Maksimovic, Filip and Miyauchi, Genki and Jayakumar, Jessica and Talamali, Mohamed S. and Watteyne, Thomas and Gro{\ss}, Roderich and Hughes, Danny}, booktitle = {2025 International Conference on Robotics and Automation (ICRA)}, pages = {570--576}, year = {2025}, organization = {IEEE}, doi = {https://doi.org/10.1109/ICRA55743.2025.11127301}, } - AAMAS
 Ready, Bid, Go! On-Demand Delivery Using Fleets of Drones with Unknown, Heterogeneous Energy Storage ConstraintsMohamed S. Talamali, Genki Miyauchi, Thomas Watteyne, Micael Santos Couceiro, and Roderich GroßIn Proc. of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2025Best Paper Award Finalist
Ready, Bid, Go! On-Demand Delivery Using Fleets of Drones with Unknown, Heterogeneous Energy Storage ConstraintsMohamed S. Talamali, Genki Miyauchi, Thomas Watteyne, Micael Santos Couceiro, and Roderich GroßIn Proc. of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2025Best Paper Award FinalistBest Paper Award Finalist
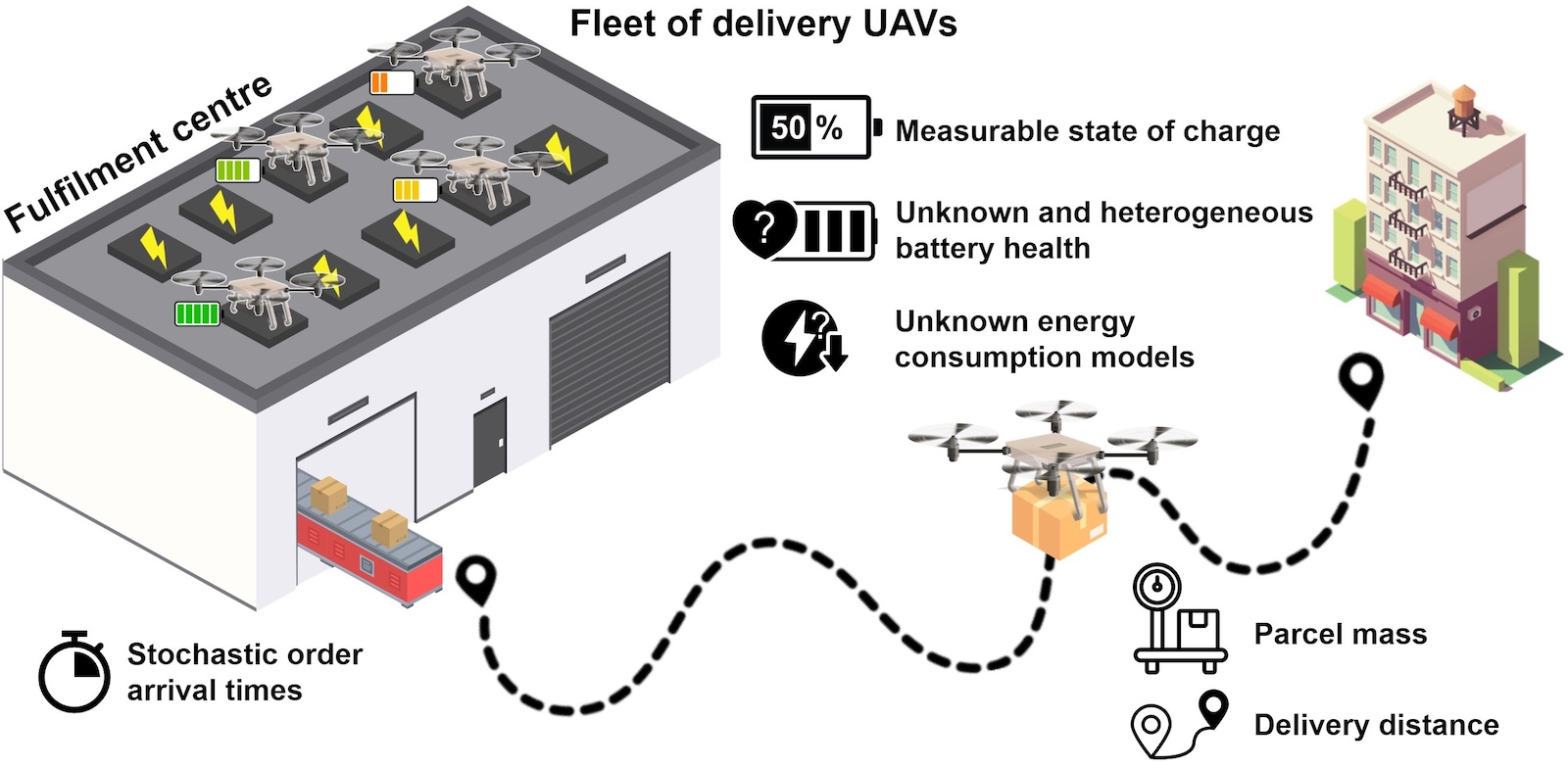
Unmanned Aerial Vehicles (UAVs) are expected to transform logistics, reducing delivery time, costs, and emissions. This study addresses an on-demand delivery scenario, in which fleets of UAVs are deployed to fulfil orders that arrive stochastically. Unlike previous work, it considers UAVs with heterogeneous, unknown energy storage capacities and assumes no knowledge of the energy consumption models. We propose a decentralised deployment strategy that combines auction-based task allocation with online learning. Each UAV independently decides whether to bid for orders based on its energy storage charge level, the parcel mass, and delivery distance. Over time, it refines its policy to bid only for orders within its capability. Simulations using realistic UAV energy models reveal that, counter-intuitively, assigning orders to the least confident bidders reduces delivery times and increases the number of successfully fulfilled orders. This strategy is shown to outperform threshold-based methods which require UAVs to exceed specific charge levels at deployment. We propose a variant of the strategy which uses learned policies for forecasting. This enables UAVs with insufficient charge levels to commit to fulfilling orders at specific future times, helping to prioritise early orders. Our work provides new insights into long-term deployment of UAV swarms, highlighting the advantages of decentralised energy-aware decision-making coupled with online learning in real-world dynamic environments.
@inproceedings{talamali2025ready, title = {Ready, Bid, Go! On-Demand Delivery Using Fleets of Drones with Unknown, Heterogeneous Energy Storage Constraints}, author = {Talamali, Mohamed S. and Miyauchi, Genki and Watteyne, Thomas and Couceiro, Micael Santos and Gro{\ss}, Roderich}, booktitle = {Proc. of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS)}, pages = {2015--2023}, year = {2025}, doi = {https://dl.acm.org/doi/10.5555/3709347.3743839}, press = {https://www.tu-darmstadt.de/universitaet/aktuelles_meldungen/einzelansicht_506752.en.jsp}, }
2024
- DARS
 On the Benefits of Robot Platooning for Navigating Crowded EnvironmentsJahir Argote-Gerald, Genki Miyauchi, Paul Trodden, and Roderich GroßIn 17th International Symposium on Distributed Autonomous Robotic Systems (DARS), 2024Best Paper Award Finalist
On the Benefits of Robot Platooning for Navigating Crowded EnvironmentsJahir Argote-Gerald, Genki Miyauchi, Paul Trodden, and Roderich GroßIn 17th International Symposium on Distributed Autonomous Robotic Systems (DARS), 2024Best Paper Award FinalistBest Paper Award Finalist
This paper studies how groups of robots can effectively navigate through a crowd of agents. It quantifies the performance of platooning and less constrained, greedy strategies, and the extent to which these strategies disrupt the crowd agents. Three scenarios are considered: (i) passive crowds, (ii) counter-flow crowds, and (iii) perpendicular-flow crowds. Through simulations consisting of up to 200 robots, we show that for navigating passive and counter-flow crowds, the platooning strategy is less disruptive and more effective in dense crowds than the greedy strategy, whereas for navigating perpendicular-flow crowds, the greedy strategy outperforms the platooning strategy in either aspect. Moreover, we propose an adaptive strategy that can switch between platooning and greedy behavioral states, and demonstrate that it combines the strengths of both strategies in all the scenarios considered.
@inproceedings{argote-gerald2024benefits, title = {On the Benefits of Robot Platooning for Navigating Crowded Environments}, author = {Argote-Gerald, Jahir and Miyauchi, Genki and Trodden, Paul and Gro{\ss}, Roderich}, booktitle = {17th International Symposium on Distributed Autonomous Robotic Systems (DARS)}, pages = {259--272}, year = {2024}, organization = {Springer}, doi = {https://doi.org/10.1007/978-3-032-04584-3_18}, press = {https://www.tu-darmstadt.de/universitaet/aktuelles_meldungen/einzelansicht_478016.en.jsp}, } - ANTS
 A Comparative Study of Energy Replenishment Strategies for Robot SwarmsGenki Miyauchi, Mohamed S. Talamali, and Roderich GroßIn 14th International Conference on Swarm Intelligence (ANTS), 2024Best Poster Award
A Comparative Study of Energy Replenishment Strategies for Robot SwarmsGenki Miyauchi, Mohamed S. Talamali, and Roderich GroßIn 14th International Conference on Swarm Intelligence (ANTS), 2024Best Poster AwardBest Poster Award
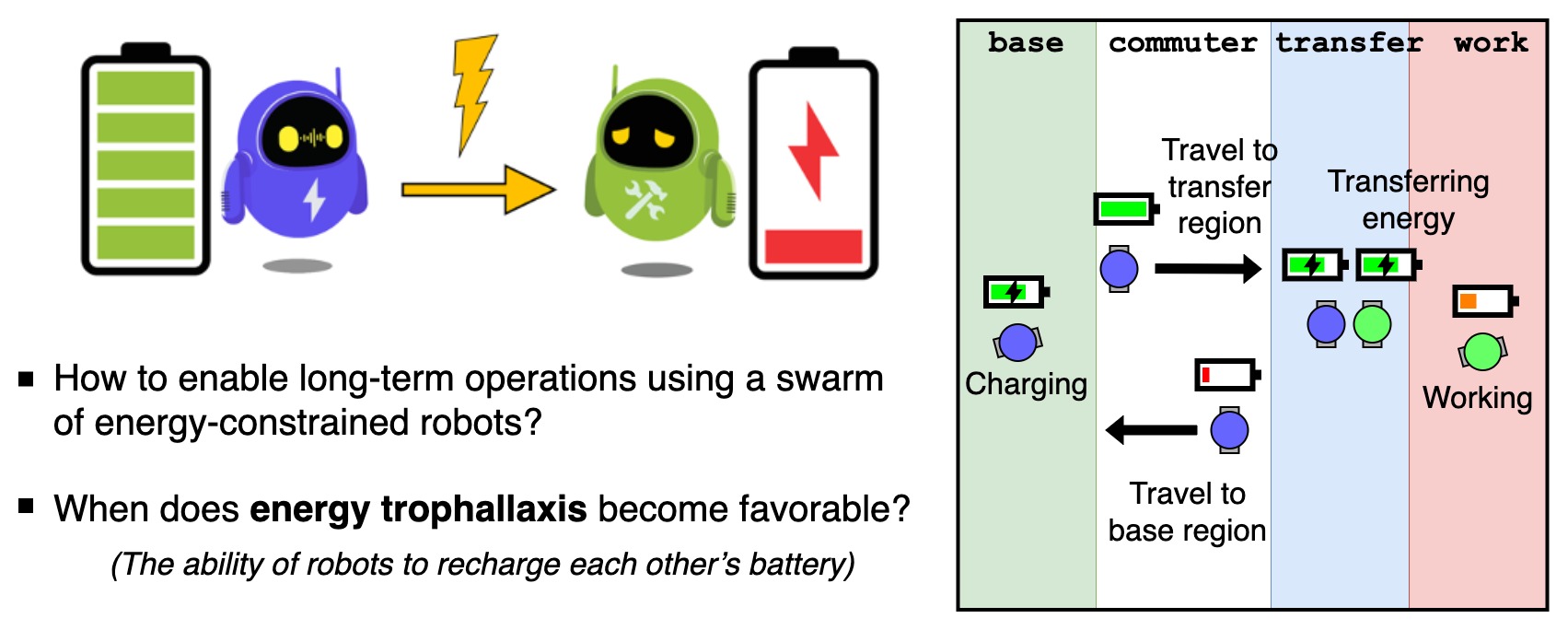
To enable long-term operations of swarms of energy-constrained robots, they need to manage both their in-flow and out-flow of energy. We consider two strategies for doing so: In the first strategy, all robots work at a remote location but due to their limited storage capacity must return to charge. In the second strategy, dedicated mobile chargers with finite storage capacity deliver energy to the remote location, substantially shortening the worker robots’ commute. We compare the work performed and the energy efficiency of these strategies using physics-based simulations and reveal conditions under which their performance is close to theoretically derived upper bounds. We assess several factors, including the number of mobile chargers, their storage capacity, transfer losses, and the ratio of energy expended while working and traveling. Our findings confirm that mobile chargers can help increase the work performed, and even overall energy efficiency provided that their energy storage is larger than that of workers.
@inproceedings{miyauchi2024comparative, title = {A Comparative Study of Energy Replenishment Strategies for Robot Swarms}, author = {Miyauchi, Genki and Talamali, Mohamed S. and Gro{\ss}, Roderich}, booktitle = {14th International Conference on Swarm Intelligence (ANTS)}, pages = {3--15}, year = {2024}, organization = {Springer}, doi = {https://doi.org/10.1007/978-3-031-70932-6_1}, }
2023
- Sharing the Control of Robot Swarms Among Multiple Human Operators: A User StudyGenki Miyauchi, Yuri K Lopes, and Roderich GroßIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Simultaneously controlling multiple robot swarms is challenging for a single human operator. When involving multiple operators, however, they can each focus on controlling a specific robot swarm, which helps distribute the cognitive workload. They could also exchange some robots with each other in response to the requirements of the tasks they discover. This paper investigates the ability of multiple operators to dynamically share the control of robot swarms and the effects of different communication types on performance and human factors. A total of 52 participants completed an experiment in which they were randomly paired to form a team. In a 2×2 mixed factorial study, participants were split into two groups by communication type (direct vs. indirect). Both groups experienced different robot-sharing conditions (robot-sharing vs. no-robot-sharing). Results show that although the ability to share robots did not necessarily increase task scores, it allowed the operators to switch between working independently and collaboratively, reduced the total energy consumed by the swarm, and was considered useful by the participants.
@inproceedings{miyauchi2023sharing, title = {Sharing the Control of Robot Swarms Among Multiple Human Operators: A User Study}, author = {Miyauchi, Genki and Lopes, Yuri K and Gro{\ss}, Roderich}, booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {8847--8853}, year = {2023}, organization = {IEEE}, doi = {https://doi.org/10.1109/IROS55552.2023.10342457}, } - Coherent movement of error-prone individuals through mechanical couplingFederico Pratissoli, Andreagiovanni Reina, Yuri Kaszubowski Lopes, Carlo Pinciroli, Genki Miyauchi, Lorenzo Sabattini, and Roderich GroßNature Communications, 2023
We investigate how reliable movement can emerge in aggregates of highly error-prone individuals. The individuals—robotic modules—move stochastically using vibration motors. By coupling them via elastic links, soft-bodied aggregates can be created. We present distributed algorithms that enable the aggregates to move and deform reliably. The concept and algorithms are validated through formal analysis of the elastic couplings and experiments with aggregates comprising up to 49 physical modules—among the biggest soft-bodied aggregates to date made of autonomous modules. The experiments show that aggregates with elastic couplings can shrink and stretch their bodies, move with a precision that increases with the number of modules, and outperform aggregates with no, or rigid, couplings. Our findings demonstrate that mechanical couplings can play a vital role in reaching coherent motion among individuals with exceedingly limited and error-prone abilities, and may pave the way for low-power, stretchable robots for high-resolution monitoring and manipulation.
@article{pratissoli2023coherent, title = {Coherent movement of error-prone individuals through mechanical coupling}, author = {Pratissoli, Federico and Reina, Andreagiovanni and Kaszubowski Lopes, Yuri and Pinciroli, Carlo and Miyauchi, Genki and Sabattini, Lorenzo and Gro{\ss}, Roderich}, journal = {Nature Communications}, volume = {14}, number = {1}, pages = {4063}, year = {2023}, publisher = {Nature Publishing Group UK London}, doi = {https://doi.org/10.1038/s41467-023-39660-6}, press = {https://www.sheffield.ac.uk/news/stretchable-robotic-fabrics-developed-university-sheffield-scientists} }
2022
- Multi-Operator Control of Connectivity-Preserving Robot Swarms Using Supervisory Control TheoryGenki Miyauchi, Yuri K Lopes, and Roderich GroßIn 2022 International Conference on Robotics and Automation (ICRA), 2022
Involving human operators to support swarms of robots can be beneficial to address increasingly complex scenarios. However, the shared control between multiple operators remains a challenge, especially where communication between the operators is not available. This paper studies the problem of forming a dynamic chain of robots connecting two operators moving within an environment. The robot chain enables operators to share information and robots among themselves. Based on supervisory control theory, we propose a distributed solution which formally guarantees that the deployed robot controllers match the modeled specifications. We validate the controllers through simulations with groups of up to 40 mobile robots in an environment with obstacles, demonstrating the feasibility of the approach.
@inproceedings{miyauchi2022multi, title = {Multi-Operator Control of Connectivity-Preserving Robot Swarms Using Supervisory Control Theory}, author = {Miyauchi, Genki and Lopes, Yuri K and Gro{\ss}, Roderich}, booktitle = {2022 International Conference on Robotics and Automation (ICRA)}, pages = {6889--6895}, year = {2022}, organization = {IEEE}, doi = {https://doi.org/10.1109/ICRA46639.2022.9812242}, }
2020
- TAROSAn Experiment on Human-Robot Interaction in a Simulated Agricultural TaskZhuoling Huang, Genki Miyauchi, Adrian Salazar Gomez, Richie Bird, Amar Singh Kalsi, Chipp Jansen, Zeyang Liu, Simon Parsons, and Elizabeth SklarIn Towards Autonomous Robotic Systems (TAROS), 2020
On the farm of the future, a human agriculturist collaborates with both human and automated labourers in order to perform a wide range of tasks. Today, changes in traditional farming practices motivate robotics researchers to consider ways in which automated devices and intelligent systems can work with farmers to address diverse needs of farming. Because farming tasks can be highly specialised, though often repetitive, a human-robot approach is a natural choice. The work presented here investigates a collaborative task in which a human and robot share decision making about the readiness of strawberries for harvesting, based on visual inspection. Two different robot behaviours are compared: one in which the robot provides decisions with more false positives and one in which the robot provides decisions with more false negatives. Preliminary experimental results conducted with human subjects are presented and show that the robot behaviour with more false positives is preferred in completing this task.
@inproceedings{huang2020experiment, title = {An Experiment on Human-Robot Interaction in a Simulated Agricultural Task}, author = {Huang, Zhuoling and Miyauchi, Genki and Gomez, Adrian Salazar and Bird, Richie and Kalsi, Amar Singh and Jansen, Chipp and Liu, Zeyang and Parsons, Simon and Sklar, Elizabeth}, booktitle = {Towards Autonomous Robotic Systems (TAROS)}, pages = {221--233}, year = {2020}, organization = {Springer International Publishing}, doi = {https://doi.org/10.1007/978-3-030-63486-5_25} } - TAROSA Study Assessing the Impact of Task Duration on Performance Metrics for Multi-robot TeamsGenki Miyauchi and Elizabeth I SklarIn Towards Autonomous Robotic Systems (TAROS), 2020
The allocation of tasks to members of a team is a well-studied problem in robotics. Applying market-based mechanisms, particularly auctions, is a popular solution. We focus on evaluating the performance of the team when executing the tasks that have been allocated. The work presented here examines the impact of one such factor, namely task duration. Building on prior work, a new bidding strategy and performance metric are introduced. Experimental results are presented showing that there are statistically significant differences in both time and distance-based performance metrics when tasks have zero vs greater-than-zero duration.
@inproceedings{miyauchi2020study, title = {A Study Assessing the Impact of Task Duration on Performance Metrics for Multi-robot Teams}, author = {Miyauchi, Genki and Sklar, Elizabeth I}, booktitle = {Towards Autonomous Robotic Systems (TAROS)}, pages = {138--143}, year = {2020}, organization = {Springer International Publishing}, doi = {https://doi.org/10.1007/978-3-030-63486-5_17} } - HRIToward Robot Co-Labourers for Intelligent FarmingZhuoling Huang, Genki Miyauchi, Adrian Salazar Gomez, Richie Bird, Amar Singh Kalsi, Chipp Jansen, Zeyang Liu, Simon Parsons, and Elizabeth SklarIn Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2020
This paper presents the results of preliminary experiments in human-robot collaboration for an agricultural task.
@inproceedings{huang2020toward, author = {Huang, Zhuoling and Miyauchi, Genki and Salazar Gomez, Adrian and Bird, Richie and Kalsi, Amar Singh and Jansen, Chipp and Liu, Zeyang and Parsons, Simon and Sklar, Elizabeth}, title = {Toward Robot Co-Labourers for Intelligent Farming}, year = {2020}, publisher = {Association for Computing Machinery}, doi = {https://doi.org/10.1145/3371382.3378333}, booktitle = {Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (HRI)}, pages = {263--265}, }